









1 引言
伴隨著列車“高速度,、高密度運行”新形勢的飛速發(fā)展,以及全國鐵路6次大提速中出現(xiàn)的“單司機、長交路”等新情況,如何在保證安全的前提下提高鐵路運營管理水平已成為鐵路發(fā)展的當(dāng)務(wù)之急,。為了保證列車的行車安全、提高列車運行效率,,研究列車速度控制并得到滿意的控制效果是非常必要的,。而列車的運行過程是極其復(fù)雜的,不確定因素多且離散性大,。對列車運行過程進行安全有效的控制仍是鐵路自動化領(lǐng)域一直未能很好解決的焦點問題之一。因此關(guān)于列車速度控制方法的研究對鐵路運輸具有十分重要的意義,。然而原有的列車速度控制方法難以滿足安全行車要求,。因此本文采用的預(yù)測控制可以根據(jù)以后的輸入對控制參數(shù)和控制策略進行有計劃的調(diào)整,降低了控制量的時滯,,提高了列車的控制效果和控制效率,。預(yù)測控制利用在線估計預(yù)測模型,減少了由于模型不準確帶來的誤差,,使得模型具有實時性,。由于預(yù)測控制采用在線滾動優(yōu)化指標和反饋校正策略,使系統(tǒng)具有較好的穩(wěn)定性和魯棒性,。
2 列車速度控制數(shù)學(xué)計算模型
2.1 列車的運動方程
列車是在具有坡道和彎道的軌道上依靠機車的粘著牽引力行駛的,,由于駕駛坡道的長度遠遠大于列車的車長,可將列車作為一個質(zhì)點處理,,其運動方程可用牛頓第二定律表示如下:
 (1)
(1)
 (2)
(2)
式中:c—作用于列車上的單位合力(kn),;
v—列車運行速度(m/s);
s—列車走行距離(m),;
因為單位合力不是常數(shù),,上述方程無法直接求解。試著用逼近法求解:假設(shè)列車在一段很小的計算時間間隔△t內(nèi)單位合力為常數(shù),,可得:
c =f(v1,s1,u1)-w(v1,s1) (3)
式中:f(v1,s1,u1),,w(v1,s1)分別為在速度v1、位置s1,、手柄級位u1時的總牽引力(包含制動力,,制動力為負)和總阻力。
因為 加入式可得:
加入式可得:
 (4)
(4)
 (5)
(5)
已知v1,,根據(jù)式(2)近似地求出這一段的c,,根據(jù)式(4)可求出v2,如此向前推算,,可以畫出列車運行的速度——距離曲線,。其中△t取得越小,,計算精度越高。
2.2 列車制動距離計算
(1)空走距離
 (6)
(6)
式中:v0—制動初速,;
tk—空走時間,。
(2)有效制動距離
用分析法可得分速度間隔的間隔距離為: (m) (7)
(m) (7)
有效制動距離為:
 (8)
(8)
用上式計算有效制動距離時,通常每個速度間隔不超過10km/h,。
3 列車速度控制預(yù)測模型
假設(shè)在時刻k有u(k)為控制輸入,,s(k)為當(dāng)前位置,v(k)為當(dāng)前速度,。根據(jù)式(2)求得列車的合力c,,根據(jù)式(4)可以確定:
 (9)
(9)
列車運行單步輸出預(yù)測模型為:
vm(k+1)=g(v(k), u(k), s(k)) (10)
式中:g(v(k), u(k), s(k))為函數(shù)表達式,表明vm(k+1)是v(k), u(k), s(k)的合成函數(shù),。由式(9)遞推疊代的方法可以得到列車多步的運行速度輸出預(yù)測公式:
vm(k+p△t) = g(v(k+(p-1)△t),…,v(k+(p-(p-1)△t)),v(k), u(k), s(k) (11)
式中:p—預(yù)測步數(shù),;
△t—采樣時間。
根據(jù)預(yù)測模型引入實際模型與預(yù)測模型當(dāng)前輸出之間的偏差進行修正,,修正后的1步預(yù)測輸出為:
vp(k+1)= vm(k+1)+h(v(k)-vm(k))
= vm(k+1)+ he(k) (12)
其中:e(k)—實際模型和預(yù)測模型k時刻的誤差,;
h—誤差修正系數(shù)。
我們可確定預(yù)測誤差的目標函數(shù)為:
jp=[vp(k+1)-v (k+1)]2 (13)
取滾動優(yōu)化中的優(yōu)化性能指標為:
jp=[vp(k+1)-v (k+1)]2 (14)
根據(jù)優(yōu)化性能指標求取最優(yōu)控制量:
令  (15)
(15)
得vm(k+1)+he(k)-v(k+1)=0 (16)
即vm(k+1)= v(k+1)-h(huán)e(k) (17)
這里 vm(k+1)=△u(k) (18)
所以,,最優(yōu)控制變化量為:
△u(k)=v(k)+he(k) (19)
4 列車速度預(yù)測控制算法
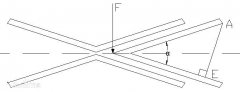
列車速度預(yù)測控制過程示意圖如圖1所示,。系統(tǒng)的控制過程以一個閉塞區(qū)間為單位進行。圖中vin為列車的入口速度,;vout為列車運行出口速度,;s(k)為制動區(qū),它是由預(yù)測模型根據(jù)線路條件,、入口/出口速度,,以標稱減壓量計算出來的;s(k+α△t)為一個控制時間α△t(α為控制時間常數(shù))內(nèi)的列車運行距離,;smax為實施上一個控制時間后,,由預(yù)測模型計算出來的余下運行時間內(nèi)的列車制動距離?!鱯為安全防護距離(貨車為100m,,客車40m)。這里的標稱減壓量隨著速度的高低有所不同,。
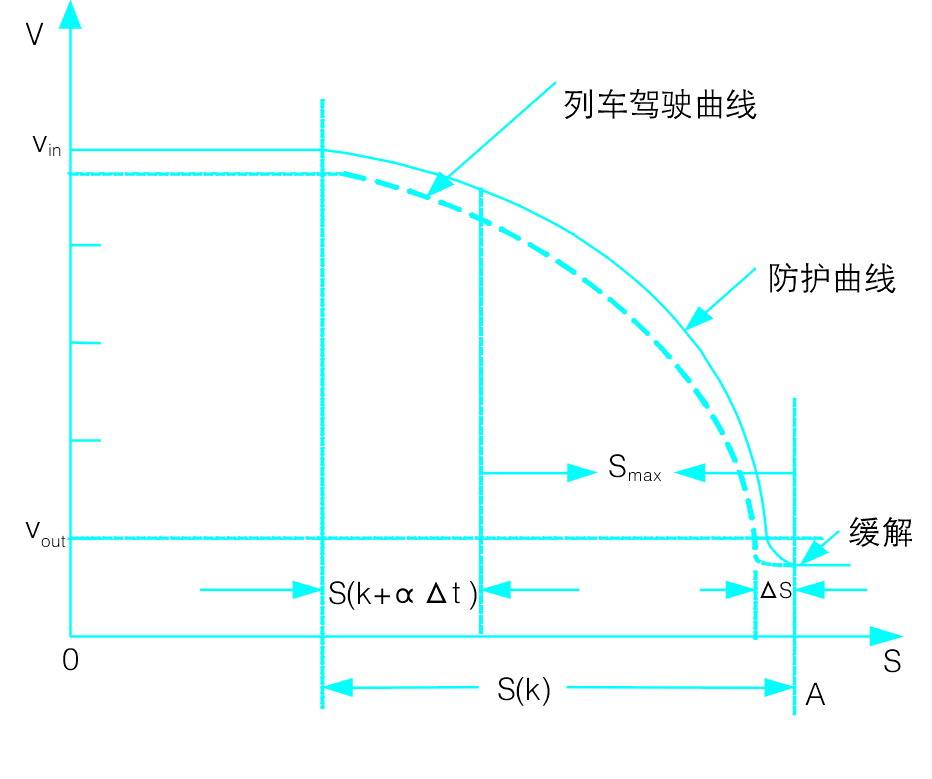
圖1 速度預(yù)測控制過程示意圖
5 仿真實驗與結(jié)果分析
以蘭州-定西鐵路線路為實驗線路,,選取駱駝巷-桑園子一個閉塞區(qū)間研究列車的速度預(yù)測控制并進行系統(tǒng)仿真。線路具體參數(shù)如下:線路全長1.9km,,最高限速為100km/h,,允許速度為60km/h,限制慢行速度為30km/h,平均坡度為6‰,,曲線半徑為r680,。機車型號為ss3b型,載重4000t,,編組50輛,,列車管壓500kpa,采用高磷閘瓦,。
根據(jù)列車運行特點,,利用預(yù)測控制方法對列車運行速度設(shè)計仿真程序,利用matlab軟件仿真,。仿真結(jié)果如圖2,、圖3、圖4所示,。
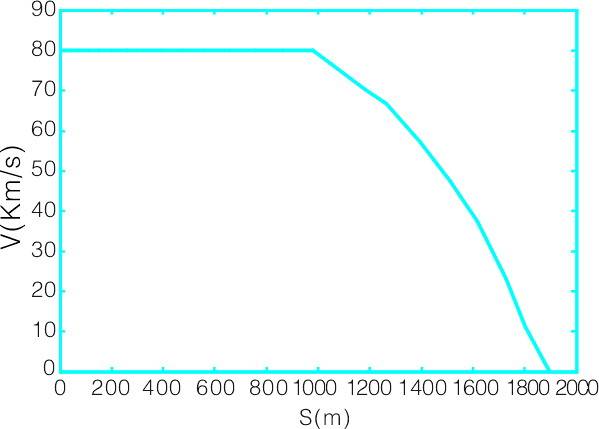
圖2 列車常規(guī)制動速度-距離控制曲線
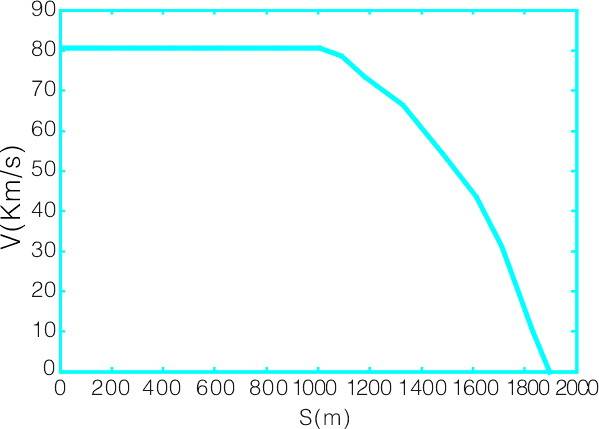
圖3 基于預(yù)測控制的列車速度-距離曲線
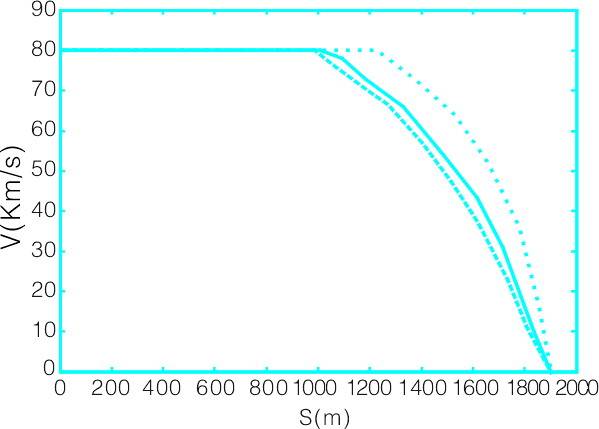
圖4 同車同速,、不同控制方法制動曲線圖
列車速度控制曲線如圖2所示。列車在979.2m開始實施制動,,在此之前進行速度為80km/h的勻速運動。然后列車開始進行加速度不等的減速運動,。列車在1.9km處速度為0,。
列車速度預(yù)測控制曲線如圖3所示。列車在距列車在1030m開始實施制動,,在此之前進行速度為80km/h的勻速運動,。因為列車的阻力與列車速度有關(guān),所以在不同速度時刻列車的阻力不同,,列車的加速度也不同,,列車運行是一變槳加速度運動。列車在1.9km處速度為0,。圖中橫坐標為列車運行預(yù)測控制的距離,,縱坐標為列車運行速度。
圖4為同車同速,、不同控制方法制動曲線圖,。圖中橫坐標為列車運行控制的距離,縱坐標為列車運行速度,。預(yù)測控制列車速度在制動過程中小于防護速度,,大于列車常規(guī)制動速度。說明列車速度預(yù)測控制方法優(yōu)于常規(guī)制動,。
作者簡介
邱亞娟(1983-) 女 碩士研究生,,研究方向為伺服電機控制技術(shù)。
參考文獻 (略)







發(fā)表評論